RTK GPS Tracker Accuracy Failure in Autonomous Fleet Deployment
RTK GPS Tracker Accuracy Failure in Autonomous Fleet Deployment
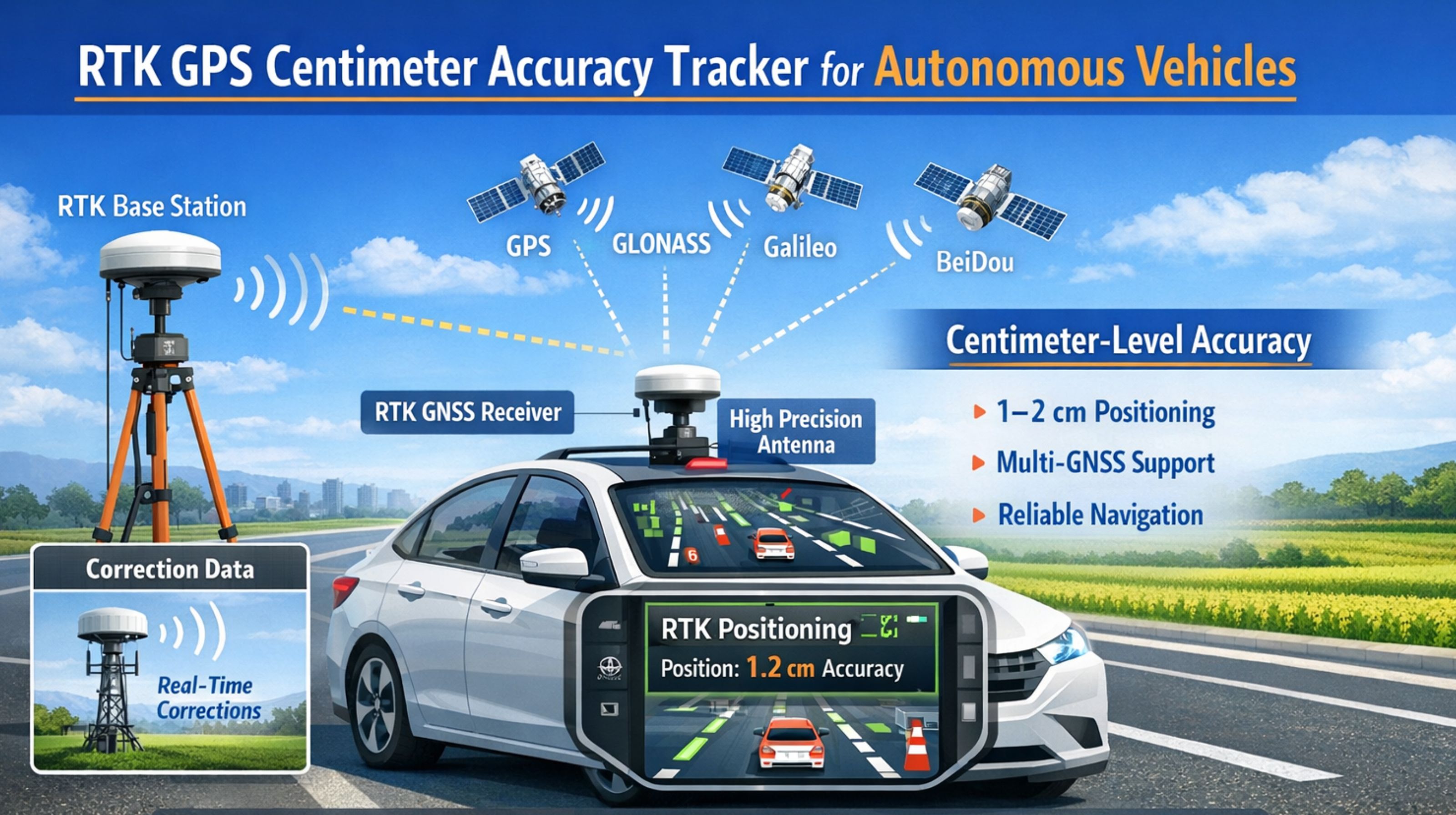
So your RTK GPS tracker promises centimeter-level precision for the autonomous vehicle pilot. That's the pitch. But the reality of signal loss and integration drift? It creates immediate deployment delays and compliance risks that, honestly, internal teams tend to underestimate until they're in it.
What RTK GPS Accuracy Means for Live Fleet Tracking
Here's the thing: RTK accuracy isn't some constant centimeter bubble around your vehicle. It's actually a fragile state, completely dependent on a continuous correction signal from a base station. The second that data link jitters or drops—which is pretty common in urban canyons or near large structures—your tracker just reverts to standard GPS accuracy. That can be off by several meters. And this isn't just a minor data error; for an autonomous system expecting lane-level precision, it's a full geofence breach event. It triggers unnecessary safety stops and halts operations completely. For reliable positioning at scale, you really can't skip a robust real-time vehicle tracking foundation. It's non-negotiable.
The Reality Under Real Vehicle Scale and Load
At a pilot scale, say 2-3 vehicles, RTK performance might look stable. The failure pattern only really emerges when you scale up. Try a dozen or more units operating in the same zone. Suddenly, the correction data stream is a shared resource, and network latency introduces these slight—but critical—timing differences between vehicles. You'll see "positional drift" where two vehicles report being centimeters apart on the map, but their onboard sensors indicate a safe gap. That creates conflicting data for the autonomous stack, which then forces conservative, inefficient driving behavior. It directly hits your route efficiency and energy consumption.
Common Failure Patterns and Wrong Assumptions
The most costly misunderstanding? Treating the RTK tracker as a simple plug-and-play location module. It's not. The tracker outputs raw positional data, but your autonomous vehicle's control system needs a filtered, validated, and timestamp-synced location stream. Without deep integration into the vehicle's own time-synchronized network, you end up with accurate coordinates delivered too late for any real-time decision-making. The result is hesitation or erratic corrections. Teams often burn months trying to fix this in software, not realizing the bottleneck is actually in the hardware communication bus and the data preprocessing layer—before the tracker's data even reaches the main fleet management software.
Decision Boundary: When to Fix, Redesign, or Replace
So, how do you decide? It really hinges on your latency tolerance and operational zone. If your vehicles operate in wide-open areas with consistent correction, and they can tolerate 100-200ms of positional latency, then sure, you can probably tune the integration. But you cross a boundary when you need sub-50ms, rock-solid reliability in variable environments, or when you're facing strict audit requirements for immutable location logs. At that point, internal fixes usually fail. You have to redesign the data ingestion pipeline with dedicated hardware abstraction, or even replace the tracker unit with a system designed for low-latency automotive integration. That's when a gps controller platform built for high-frequency, low-jitter data becomes a contextual necessity, not just a data viewer.
FAQ
q How accurate is RTK GPS in real-world driving?
a Real-world RTK accuracy is conditional. You might get 1-4 centimeters with a perfect signal, but it can degrade to several meters the moment the correction signal drops—which happens near tall buildings or under dense tree cover.
q What causes RTK GPS to fail for autonomous vehicles?
a Failure usually comes from a few places: correction signal interruption, network latency in the data link itself, and then integration delays where the accurate position just isn't processed fast enough by the vehicle's control system to be useful.
q Can I scale an RTK tracking system from a pilot to a full fleet?
a Scaling is where it gets hard. It introduces shared network resource contention, way more data stream management complexity, and it magnifies any tiny latency issue. Often, you need a redesigned data infrastructure, not just more devices.
q When should we abandon fixing our RTK setup and redesign?
a A redesign becomes mandatory when your positional latency exceeds what your control system can tolerate, when signal reliability in your operational zone dips below 95%, or when compliance logging starts showing inconsistent data that you just can't resolve through configuration.



Comments
Post a Comment